//Authors: Gonçalo Azinheira and João Castro, students at University of the Algarve(Ualg);
//Project: Mazemaster3000;
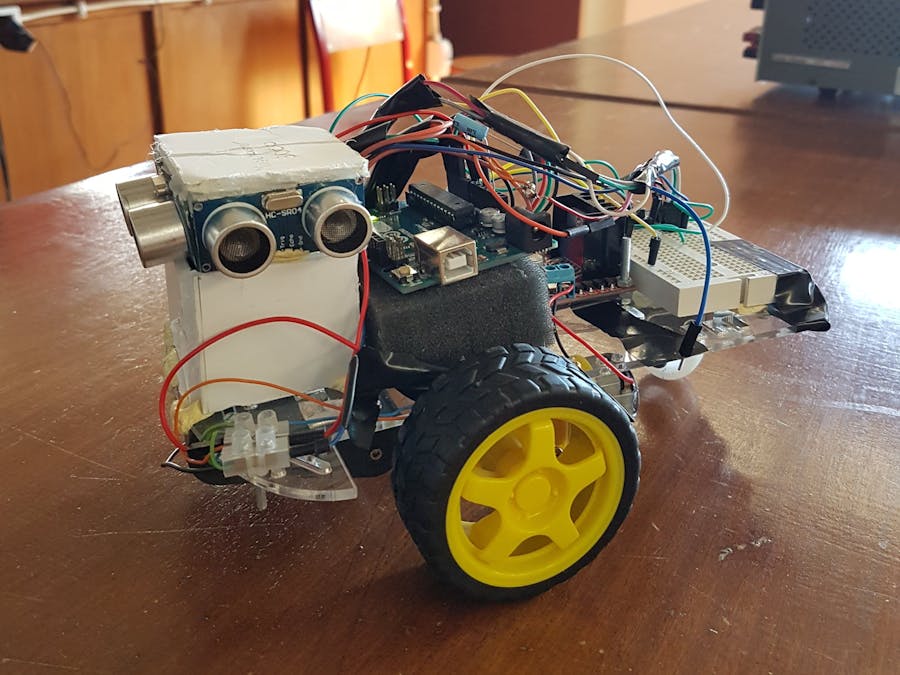
//Subject: A finite state machine-powered maze solver. The starting point of the maze must be in one of the left corners and the ending must be in one of the right corners.
//----------------------------------------------------------------------------
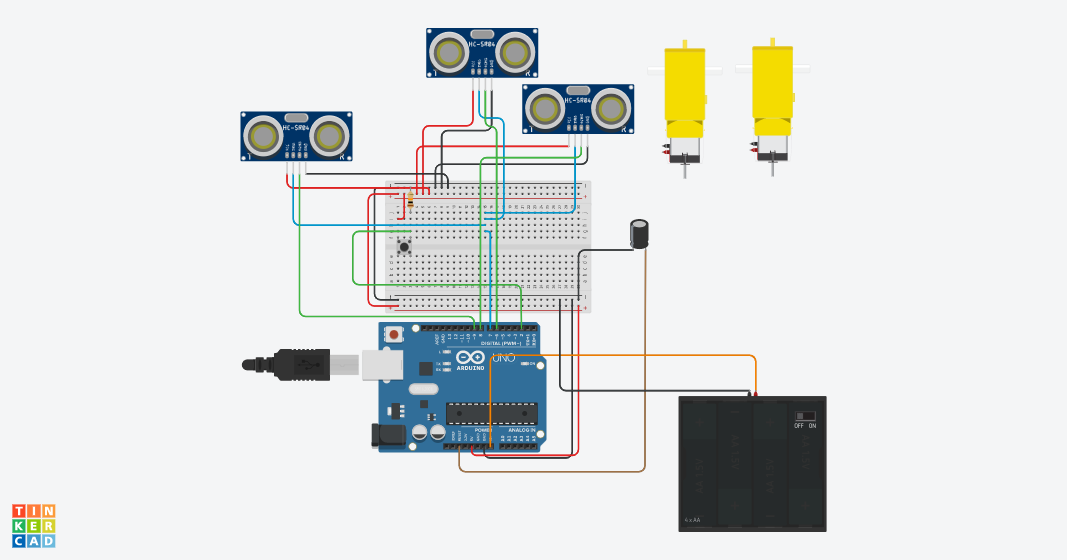
const int pingt = 7; //the same trigger is used by all sensors
const int pinge2 = 6; //front ultrassonic sensor
const int pinge1 = 8; //right ultrassonic sensor
const int pinge3 = 9; //left ultrassonic sensor
int rec[50];
int a;
int In1 = A5; //right
int In2 = A4; //right
int In3 = A3; //left
int In4 = A2; //left
int EnA = 10; //right
int EnB = 11; //left
int dir;
int esqdist;
int dirdist;
int fdist;
boolean button=0;
void B_ISR(){ //The button is activated by an Interrupt System Routine
button=1;
}
void setup() {
Serial.begin(9600);
//button=0;
pinMode(button, INPUT);
attachInterrupt(0,B_ISR,RISING);
pinMode(pingt, OUTPUT);
pinMode(pinge1, INPUT);
pinMode(pinge2, INPUT);
pinMode(pinge3, INPUT);
a=0;
pinMode(In1, OUTPUT);
pinMode(In2, OUTPUT);
pinMode(In3, OUTPUT);
pinMode(In4, OUTPUT);
pinMode(EnA, OUTPUT);
pinMode(EnB, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
analogWrite(EnA, 200);
analogWrite(EnB, 200);
}
//******************************************
//---------------------------------------------------
int ping (int pinge){
long duration, cm;
int x,xmed;
int dela=25;
int MAX = 1500;
int num = 0;
int sum=0;
for(int i=0;i<=5;i++){
digitalWrite(pingt, LOW);
delayMicroseconds(2);
digitalWrite(pingt, HIGH);
delayMicroseconds(5);
digitalWrite(pingt, LOW);
duration = pulseIn(pinge, HIGH);
x = microsecondsToCentimeters(duration);
if(x<MAX){
num ++;
}
else{x=0;}
sum+=x;
delay(dela);
}
xmed=sum/num;
return xmed;
}
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the object we
// take half of the distance travelled.
return microseconds / 29 / 2;
}
//-----------------------------------------------
//**********************************
//Each funcion uses different values in the analogWrite and delay. That's because the motors aren't exactly the same and the battery will slightly lose power.
void walk(int wtime) //Makes the cars go straight
{
analogWrite(EnA, 173);
analogWrite(EnB, 171);
digitalWrite(In1, HIGH);
digitalWrite(In2, LOW);
digitalWrite(In3, HIGH);
digitalWrite(In4, LOW);
delay(wtime*1.8);
digitalWrite(In1, LOW);
digitalWrite(In2, LOW);
digitalWrite(In3, LOW);
digitalWrite(In4, LOW);
delay(5);
}
void turnR(int wtime) //Makes the car turn right and then go straight
{
analogWrite(EnA, 192);
analogWrite(EnB, 172);
digitalWrite(In1, LOW);
digitalWrite(In2, HIGH);
digitalWrite(In3, HIGH);
digitalWrite(In4, LOW);
delay(wtime-141);
analogWrite(EnA, 170);
analogWrite(EnB, 170);
digitalWrite(In1, HIGH);
digitalWrite(In2, LOW);
digitalWrite(In3, HIGH);
digitalWrite(In4, LOW);
delay(wtime*2+50);
digitalWrite(In1, LOW);
digitalWrite(In2, LOW);
digitalWrite(In3, LOW);
digitalWrite(In4, LOW);
delay(5);
}
void turnL(int wtime) //Makes the car turn left and then go straight
{
analogWrite(EnA, 170);
analogWrite(EnB, 170);
digitalWrite(In1, HIGH);
digitalWrite(In2, LOW);
digitalWrite(In3, LOW);
digitalWrite(In4, HIGH);
delay(wtime-130);
analogWrite(EnA, 170);
analogWrite(EnB, 170);
digitalWrite(In1, HIGH);
digitalWrite(In2, LOW);
digitalWrite(In3, HIGH);
digitalWrite(In4, LOW);
delay(wtime*2+30);
digitalWrite(In1, LOW);
digitalWrite(In2, LOW);
digitalWrite(In3, LOW);
digitalWrite(In4, LOW);
delay(5);
}
void back(int wtime) //Makes the car turn around 180. This happens when the sensor detect obstacles in all directions.
{
analogWrite(EnA, 170);
analogWrite(EnB, 170);
digitalWrite(In1, LOW);
digitalWrite(In2, HIGH);
digitalWrite(In3, HIGH);
digitalWrite(In4, LOW);
delay(wtime+220);
digitalWrite(In1, LOW);
digitalWrite(In2, LOW);
digitalWrite(In3, LOW);
digitalWrite(In4, LOW);
delay(5);
}
//**********************************
//-----------------------------------------------
//This is the implementation of the finit state machine shown in the picture. It starts always in state -1 and stays there until the button is pressed. After that, it will go to state 0
//and measures the distances using the ultrassonic sensors using the pings() function. According to what it measured, the finite state machine will go to the corresponding state using the
//dir value (the meaning of this variable is explained below in the pings() function). The states 1 to 4 are responsible for making the car turn right, go straight, turn left or turn around respectively.
//At each of those states, the first thing that is done is record a value in the array rec []. This value is equal to the the present state of the machine. For example, if the car is going
//straight ahead, it is in state 2 and the value recored in the array will be also 2. In other words, the array stores the actions done by the car to be written in the function Recb().
//The cars reaches to the end if it does 3 lefts in a row and to do so, it needs to go to state 3, state 8 and 5 consecutively. So state 8 represents the 2nd left and state 5 represents the
//3rd left. After reaching to the end of the maze, it goes from state 5 to 6. By this point, the finite state machine will be always moving from state 6 to 7 and vice-versa.
//State 6 turns on the arduino's builtin LED and state 7 turns it off. Regardless of if it is in 6 or 7, it waits for the button to be pressed to print the log.
void MazeMaster_FSM(){
static int state=-1; //The initial state is always -1 until the button is pressed.
const int D = 20; //This is the reference distance, in cm, for the car to consider the obstacles. If the sensor detects something below this distance, it will consider as an obstacle.
const int wtime = 500; //Time used on each action(right, straight, left or turn around).
switch(state){
case -1:
if(button==1)
{button=0;
state=0;}
break;
case 0:
dir=pings();
state=dir;
break;
case 1:
Serial.print("state = ");
Serial.println(state);
rec[a]=1;
a++;
turnR(wtime);
dir=pings();
state=dir;
break;
case 2:
Serial.print("state = ");
Serial.println(state);
rec[a]=2;
a++;
Serial.print("a2 = ");
Serial.println(a);
walk(wtime);
dir=pings();
state=dir;
break;
case 3:
Serial.print("state = ");
Serial.println(state);
rec[a]=3;
a++;
turnL(wtime);
dir=pings();
if(dir==3)state=8;
else state=dir;
break;
case 4:
Serial.print("state = ");
Serial.println(state);
rec[a]=4;
a++;
Serial.print("a4 = ");
Serial.println(a);
back(wtime);
dir=pings();
state=dir;
break;
case 5:
Serial.print("state = ");
Serial.println(state);
rec[a]=3;
a++;
turnL(wtime);
Serial.println("I HAVE ARRIVED! ");
rec[a]=5;
state=6;
break;
case 6:
digitalWrite(LED_BUILTIN,HIGH);
if(button==1)
{Recb();
button==0;}
delay(500);
state=7;
break;
case 7:
digitalWrite(LED_BUILTIN,LOW);
if(button==1)
{Recb();
button==0;}
delay(500);
state=6;
break;
case 8:
Serial.print("state = ");
Serial.println(state);
rec[a]=3;
a++;
turnL(wtime);
dir=pings();
if(dir==3)state=5;
else state=dir;
break;
}
}
//------------------------------
void Recb(){
Serial.print("start -> ");
for(int i=0;i<=a;i++)
{Serial.println(rec[i]);}
button=0;
}
//---------------------------
//This is the function that measures the distances using the ultrassonic sensors.
//As the ending of the maze is always in the right corner, the function will give priority the right . It will only start measuring the front distance
//if the right sensor detects an obstacle (values below 20cm). The same goes for the left sensor, it will only start measuring if the right and front sensors detect an obstacle.
//This type of functioning prevents the car to waste time in measuring distances that aren't be necessary.
//The function pings() returns a value, called dir, between 1 and 4. 1 - No obstacle on the right, 2 - Obstacle on the right, 3 - Obstacles in front and right and 4 - Obstacles in all directions.
int pings(){
const int D = 20;
dirdist = ping(pinge1);
Serial.print("distance at right(->) = ");
Serial.println(dirdist);
if(dirdist>D){dir=1;}
else{
fdist = ping(pinge2);
Serial.print("distance at front(^) = ");
Serial.println(fdist);
if(fdist>D){dir=2;}
else{
esqdist = ping(pinge3);
Serial.print("distance at left(<-) = ");
Serial.println(esqdist);
if(esqdist>D){dir=3;}
else {dir=4;}
}
}
return dir;
}
//---------------------------
void loop() {
MazeMaster_FSM();
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments